Convolution#
Convolution is an operation that takes two functions and outputs a new function. In that sense, it is very similar to addition or multiplication. Given two function \(y_1, y_2\) we can compute a new function
The same is true for the convolution of these two functions:
But what does the convolution operator \(*\) really do?
Discrete Convolution#
Let us start with two arrays of numbers which represent discrete functions \(y_1, y_2\).
We can use component-wise multiplication to generate a new function:
[1,2,3,4] * [-1,3,-1,3] // [ -1, 6, -3, 12 ], y_1[k] * y_2[k]
In that case,
The convolution is defined very differently. The idea is to mirror the second function and to compute the weighted sum of a sliding window.
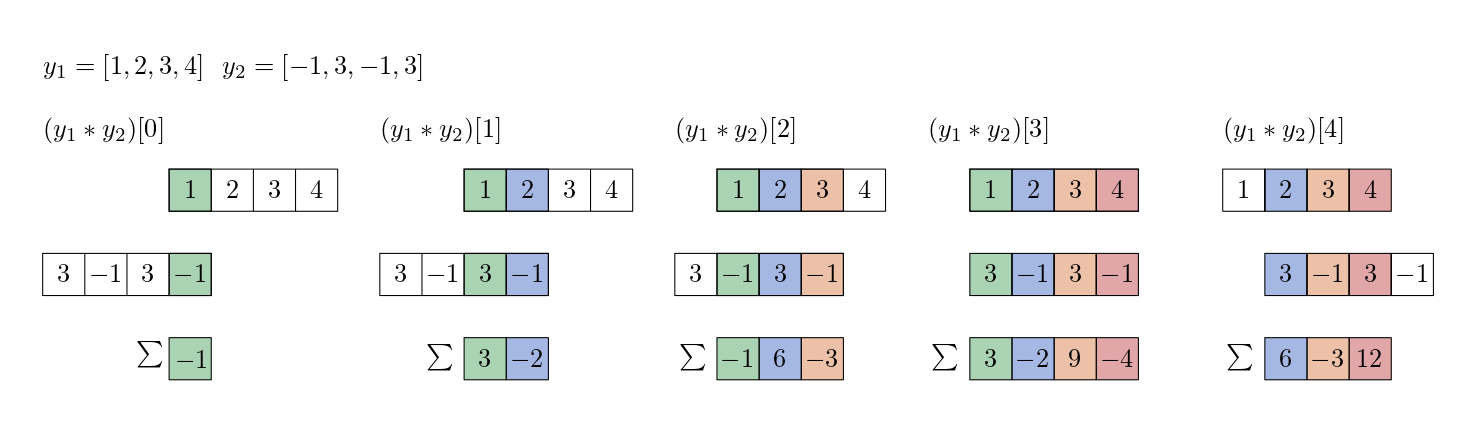
Fig. 25 Visualization of the computation of a convolution of two discrete signals (arrays of numbers).#
Given \(y_1 = [1,2,3,4]\) and \(y_2 = [ -1, 6, -3, 1]\), we use sliding window to compute the new function by a weighted sum.
Interestingly, the lengths of the signals do not have to match, and the new length of the new signal is equal to the sum of the length of the original signals minus 2.
The following sclang function computes the convolution of two discrete function:
(
~convolve = {arg a, b;
var a_pad, b_pad, result, val;
a_pad = Array.fill(b.size-1, 0) ++ a;
b_pad = b.reverse ++ Array.fill(a.size-1, 0);
result = [];
for(0, a.size+b.size-2, {
val = (a_pad * b_pad).sum;
result = result ++ [val];
b_pad = b_pad.rotate(1);
});
result;
};
)
~convolve.([1,2,3,4], [-1,3,-1,3]); // [ -1, 1, 2, 6, 15, 5, 12 ]
Convolution of Discrete Signals
Given two discrete and finite signals \(y_1, y_2 : \mathbb{N} \rightarrow \mathbb{R}\) of length \(N_1\) and \(N_2\) respectively. Then the convolution of those two signals is defined by
where \(y: \{0, \ldots, N_1 + N_2 - 2\} \rightarrow \mathbb{R}\).
Since we are most interested in periodic functions, a more useful definition is given by the circular discrete convolution. In that case, we take \(y_2\) to be \(N_2\)-periodic.
Circular Discrete Convolution
Given two discrete signals \(y_1, y_2\), where \(y_1\) is defined for \(0, \ldots N-1\) and \(y_2\) is a periodic function with period equal to \(N_2\). Then the circular convolution of those two signals is defined by
where \(y : \mathbb{Z} \rightarrow \mathbb{R}\) is periodic.
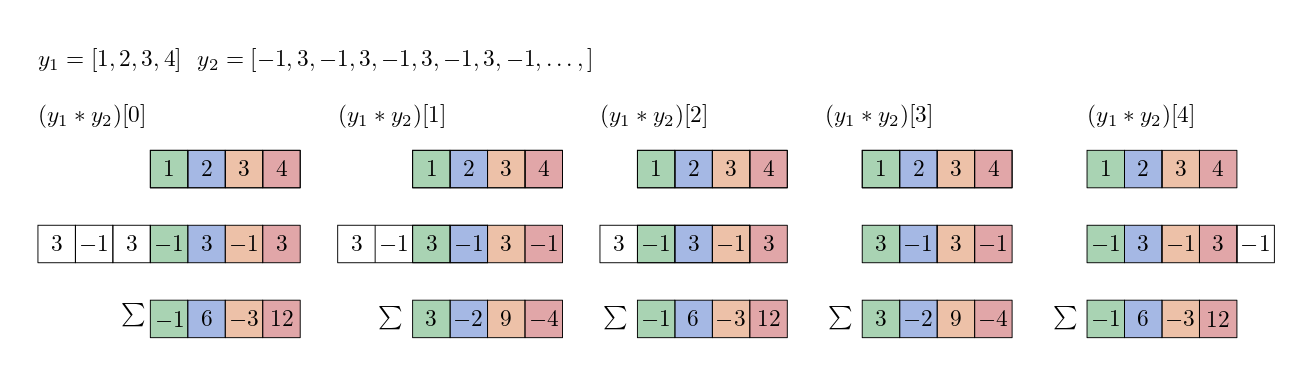
Fig. 26 Visualization of the computation of a convolution of two discrete signals (arrays of numbers) where the second is (infinite) and periodic.#
The circular convolution of a finite signal with an infinite periodic discrete function is an infinite periodic function.
Thus in our code we do not construct an Array but a new function.
(
~cconvolve = {arg a, b;
var func = {arg n;
(a *.s (b.reverse.rotate).rotate(n)).sum;
};
func;
};
f = ~cconvolve.([1,2,3,4], [-1,3,-1,3]);
y = Array.fill(12, {arg i; f.(i);});
y // [ 14, 6, 14, 6, 14, 6, 14, 6, 14, 6, 14, 6 ]
)
The sclang code is relatively short.
cconvolve returns the function, i.e., \(y\), based on the two arrays, but here we assume the second one is circular.
Since our second array has a period of 2, the resulting signal \(y\) also has a period of 2.
Note that the convolution is like multiplying two functions, but one is mirrored and shifted. \((y_1 \cdot y_2)[n]\) is positive if the two functions are either both positive or both negative at \(n\). Therefore, if \(y_1, y_2\) are periodic functions with DC = 0, \((y_1 \cdot y_2)(t)\) says something about their similarity, see section Similarity of Periodic Functions.
Since the convolution is the sum of these similarity measures, it tells us something about the similarity of the two functions too. In our example, we can see that \(y_2\) mirrored is most similar if it is not shifted. The argument \(n\) of \((y_1 * y_2)[n]\) defines the shift of the second function, which determines the phase if we are in the domain of periodic functions! Therefore, the biggest value in \((y_1 * y_2)[n]\) indicates the phase for which the mirrored version of \(y_2\) is most similar to \(y_1\).
If both signals are discrete but infinite (and defined on \(\mathbb{Z}\)), the discrete convolution of \(y_1, y_2\) is given by:
Continuous Convolution#
If \(y_1, y_2\) are continuous functions then the sum becomes an integral.
Convolution
Given two functions \(y_1, y_2 : \mathbb{R} \rightarrow \mathbb{R}\) then the convolution is defined by
This looks intimidating but there is nothing to fear. Instead of a sum over an index \(k\) we have the integration over \(\tau\) and \(t\) represents the shift of our second (mirrored) function.
Rules#
Imagine the function \(y\) which is 1 between 0 and 1 and zero elsewhere. \(y\) represents a square. Consequently, \((y * y)\) represents the overlapping area of two squares. Since the second square is mirrored at the y-axis, \((y * y)(t) = 0\) for \(t=0\). However, if we increase \(t\), \((y * y)\) increases linearly until it reaches its maximum at \((y * y)(1) = 1\). Then it decreases again. Therefore, \((y * y)(t)\) is a triangle!
Let us illustrate some more examples. In the following plot each row represents one convolution. In the first and second column you find the functions \(y_1, y_2\) and in the third column the plot shows \(y_1 * y_2\).
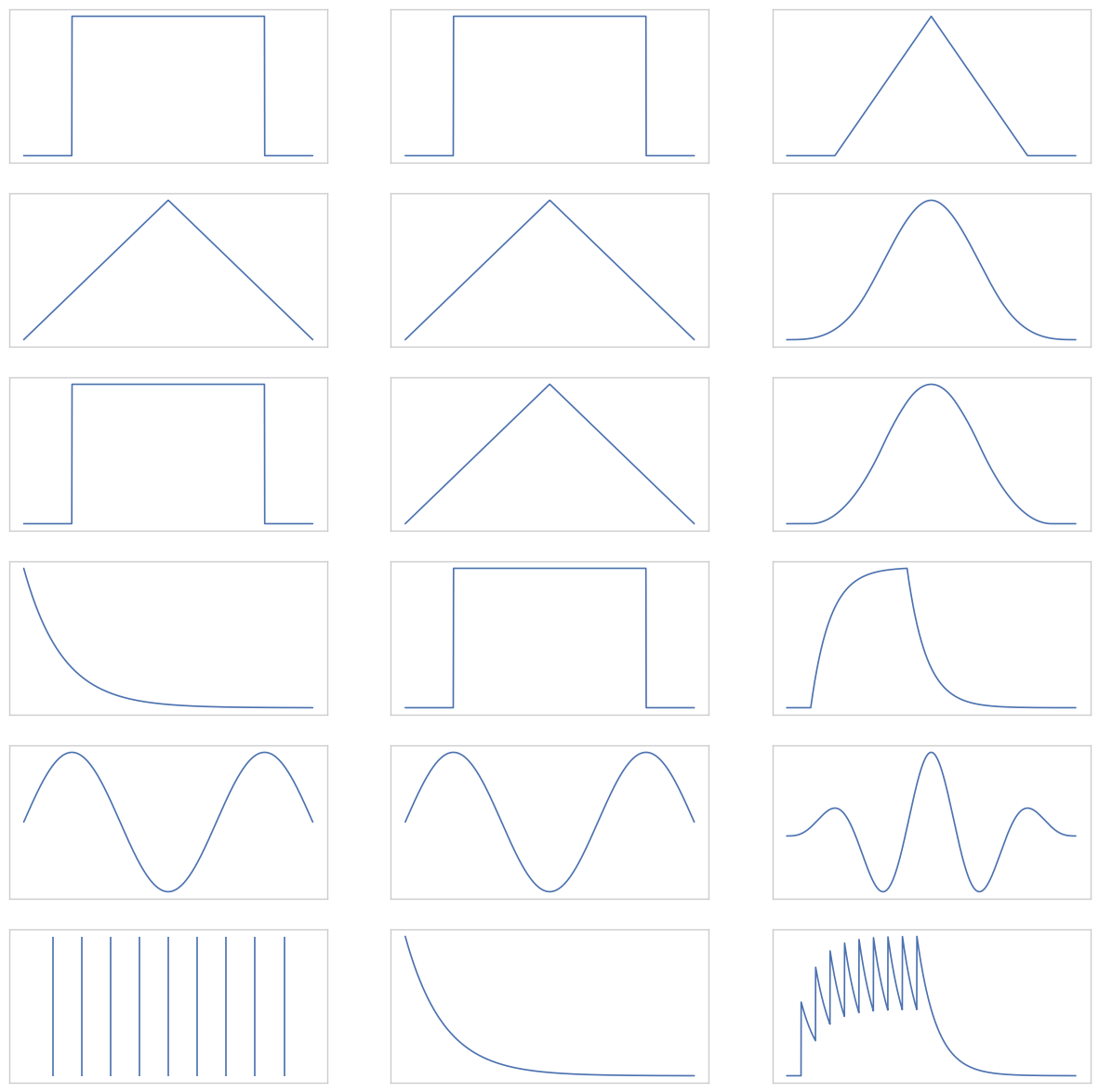
Fig. 27 Different continuous convolutions. Functions of the first two columns are convoluted resulting in the third column.#
The plots show us some effects of the convolution:
Convolving a function \(y\) with an impulse function just copies \(y\).
Convolving \(y\) with a shifted impulse function makes a shifted copy of \(y\).
Convolving \(y\) with a scaled impulse function scales \(y\).
Convolving \(y\) with a scaled, shifted impulse function scales and shifts \(y\).
Convolving with an impulse train (last row) adds a shifted original to the output for each impulse.
As many copies will be superimposed as there are nonzero impulses.
Copies will be shifted (delayed) by the position of the impulse in the impulse train function.
Shifted copies will be scaled by the amplitude of the impulses.
Shifted, scaled copies of the original are summed, smearing the result.
Convolution Theorem
Let \(y_1, y_2\) be two functions for which we can compute the respective Fourier transform \(Y_1 = \mathcal{F}\{y_1\}\), and \(Y_2 = \mathcal{F}\{y_2\}\) respectively. Then
and
Multiplying in the time domain convolves in the frequency domain and multiplying in the frequency domain convolves in the time domain. Therefore, to compute the convolution one can do so by computing the Fourier transform beforehand. In fact, this is how the unit generators, such as Convolution, are implemented.
The Convolution Unit Generator#
We can compute a discrete convolution on the audio server using the Convolution unit generator. Let’s try to construct a triangle wave by convolving two pulse waves.
({
var n, sig;
n = 512;
sig = LFPulse.ar(s.sampleRate/n);
sig = Convolution.ar(sig, sig, 2*n) * n.reciprocal;
sig
}.plot(512*5/s.sampleRate);
)
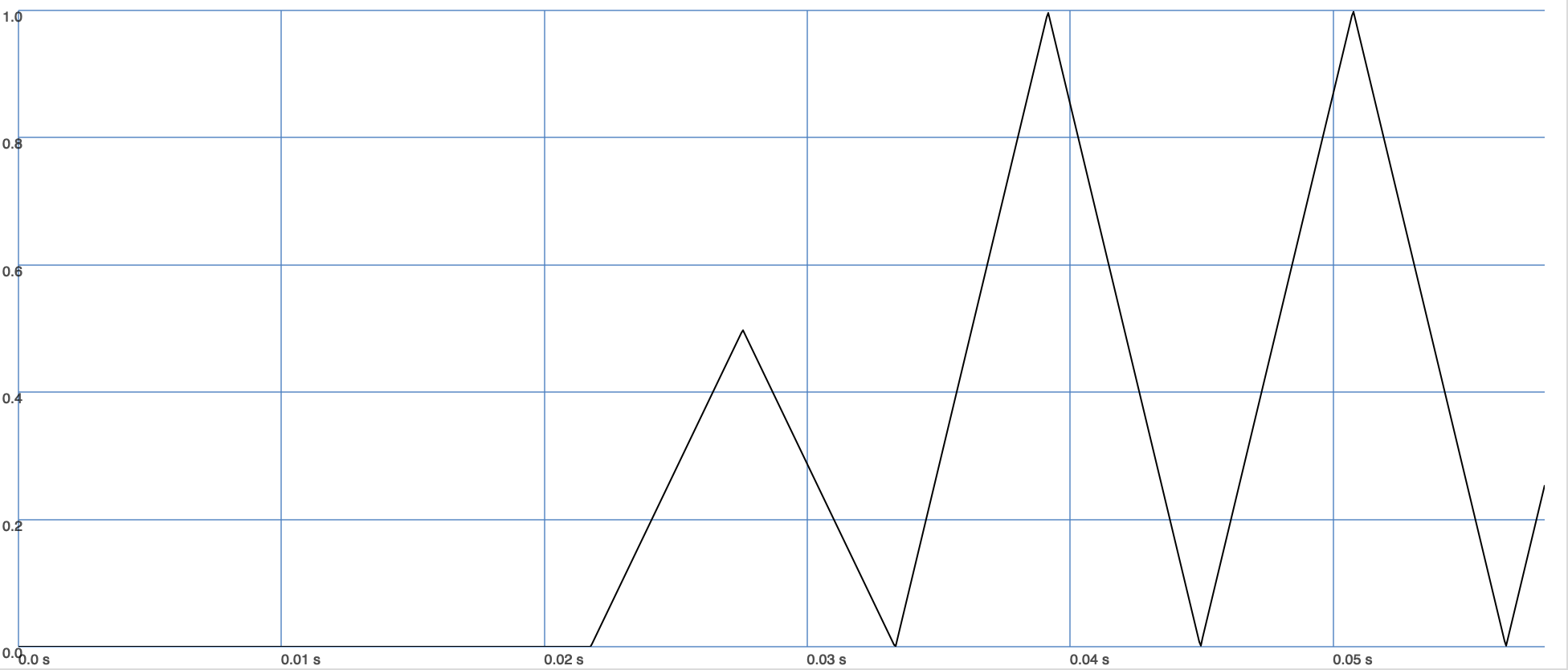
Fig. 28 Convoluting two pulse waves results in a triangle wave.#
As you can see, we get the expected result!
({
var n, sig, kernel;
n = 512;
sig = LFSaw.ar(s.sampleRate/n);
kernel = LFSaw.ar(s.sampleRate/n);
sig = Convolution.ar(sig, kernel, 2*n) * n.reciprocal;
sig
}.plot(512*5/s.sampleRate);
)
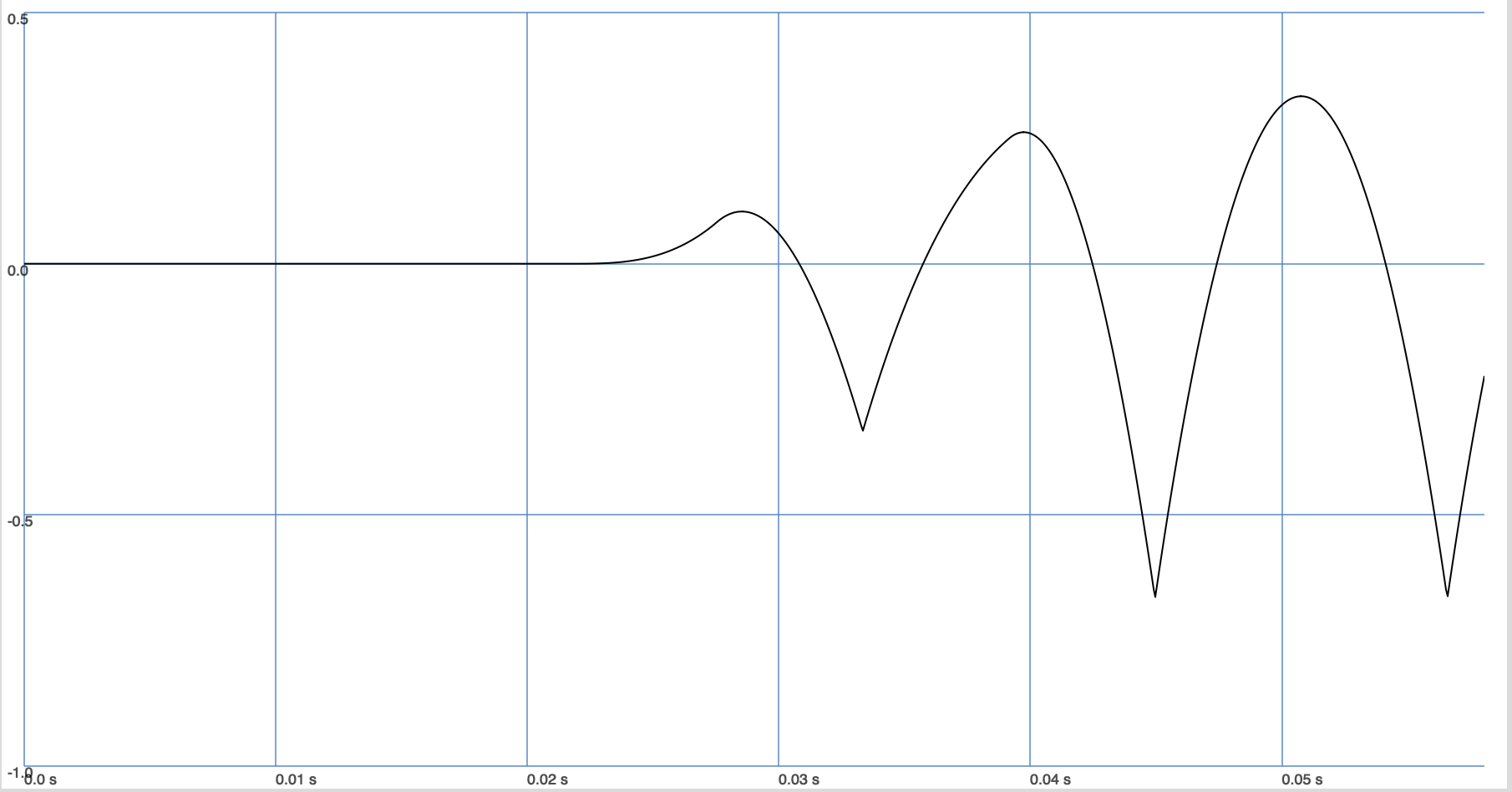
Fig. 29 Convoluting two sawtooth waves results in parabola-like wave.#
To compute ‘perfect’ convolution in the time domain, one requires all function values beforehand. This would make real-time processing impossible! Therefore, Convolution computes a windowed Fourier transform, i.e., the Fourier transform of a short snippet of the functions (input and the kernel). Based on that, it computes the convolution of those snippets. To do so, the unit generator has to fill a buffer of a specific size (twice the number of framesize). Before the convolution can start, the buffer has to be filled; therefore, the result is zero at the beginning. The larger the buffer, the more expensive the operation gets and the more zeros there are at the beginning. If one period of the signals fits approximately into the buffer, the result will look approximately similar to a ‘perfect’ convolution.